Learning Python with Advent of Code Walkthroughs
Dazbo's Advent of Code solutions, written in Python
The Python Journey - Visualisations and Plots with Matplotlib
Useful Links
MatplotlibOfficial Matplotlib TutorialsGeeks-for-Geeks Matplotlib TutorialGraph Plotting with MatplotlibPython Guides Matplotlib TutorialsImproving Your GraphsSeabornNumPy
Page Contents
- Overview
- Installing
- Basic Usage
- Examples
- Basic Line Plot
- Line Plots with Equations
- Argand Diagram
- Scatter Plot: No Lines
- Inverted and With Hidden Axes: Rendering Characters!
- Rendering Cubes using Matplotlib and NumPy
- Rendering 3D Conway Cubes Animation, With NumPy and 3D Scatter
- 2D Hexagons Animation
- 2D Migration Animation
- Rendering an Animated Snake with Scatter
- Visualising a Path Through a Maze
- Another Grid Visualisation
- Plotting Trajectories
- Plotting 3D Beacons
- Plotting a 2D grid from NumPy, with Legend
- Plotting and Filling a Polygon
- Plotting a Perimeter and Marking Contained Points
- Creating Squares Around Points
- Animating with Matplotlib
- Seaborn
Overview
Matplotlib is an amazing library for creating static, animated and interactive visualisations in Python, including graphs and 3D plots.
Installing
py -m pip install matplotlib
Basic Usage
- Many of the basic capabilities you’ll need are exposed through the
pyplot. So the first thing you’ll want to do is importpyplot. - Visualisations are created on
figures, which in turn contain one more moreaxes; i.e. an individual plot area.
Getting Axes
Here are a few ways to obtain axes for plotting on:
from matplotlib import pyplot as plt
fig, axes = plt.subplots()
# or with 'get current axes'
axes = plt.gca()
# to set all axes to use equal aspects, rather than auto...
axes.set_aspect('equal', adjustable='box')
Showing the Visualisation
# To show interactively, i.e. pausing code execution until the window is closed
plt.show()
Grid Lines and Axis Limits
# add grid lines
axes.grid(True)
# set the limits for each axis
axes.set_xlim(-4, 4)
axes.set_ylim(-4, 4)
axes.set_xlabel("real")
axes.set_ylabel("imag")
plt.show()
The output looks like this:
Of course, there’s no data yet.
Saving the Visualisation to a File
Instead of rendering the visualisation interactively, we can instead save it. This is easy to do. Instead of using plt.show(), we use plt.savefig() and pass in the file we want to save to.
# Save visualisation to a file
plt.savefig("myfile.jpg")
# With a transparent background
plt.savefig("myfile.jpg", transparent=True)
Maybe we want to save to a particular folder, and create that folder if it doesn’t already exit:
from pathlib import Path
SCRIPT_DIR = Path(__file__).parent # working directory
OUTPUT_DIR = Path(SCRIPT_DIR, "output/") # where we want to put our new file
OUTPUT_FILE = Path(OUTPUT_DIR, "my_vis.png") # the name of our new file
if not Path.exists(OUTPUT_DIR): # Create folder if it doesn't exist
Path.mkdir(OUTPUT_DIR)
plt.savefig(OUTPUT_FILE)
Examples
The next few examples will start with this:
from matplotlib import pyplot as plt
fig, axes = plt.subplots()
# add grid lines
axes.grid(True)
axes.set_xlabel("x")
axes.set_ylabel("y")
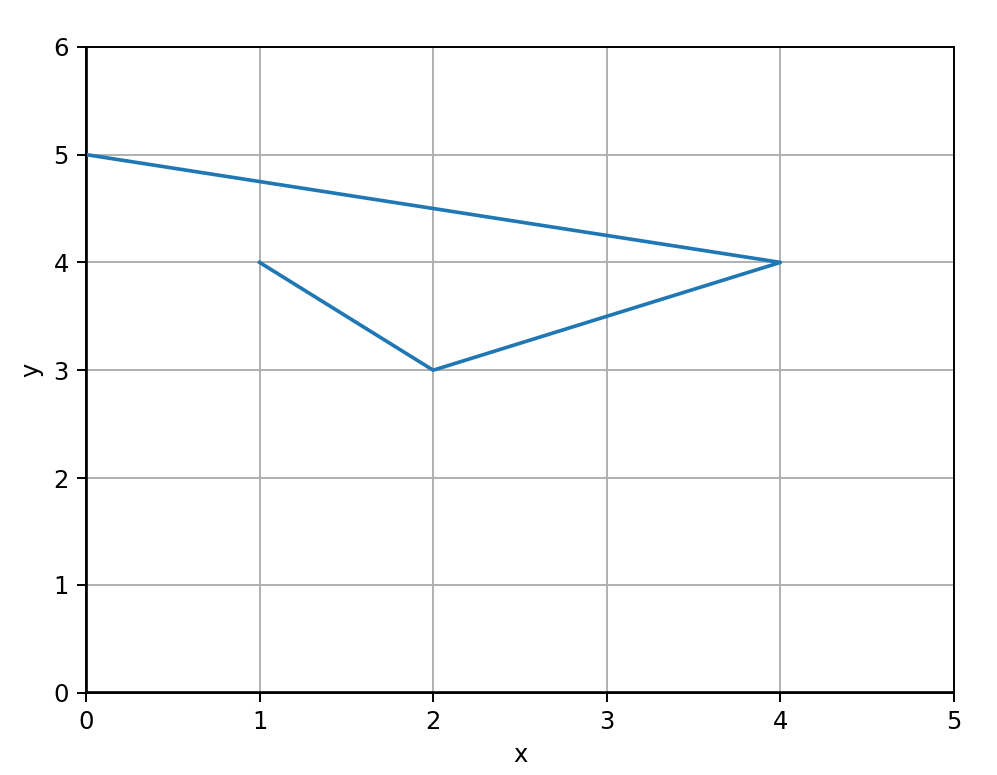
Basic Line Plot
# create list of points
points = [ (1, 4), (2, 3), (4, 4), (0, 5) ]
# Unpack our x, y vals
all_x, all_y = zip(*points)
# Create out axes
fig, axes = plt.subplots()
# add lines at x=0, y=0 and labels
plt.axhline(0, color='black')
plt.axvline(0, color='black')
axes.set_xlim(0, max(all_x)+1)
axes.set_ylim(0, max(all_y)+1)
axes.set_xlabel("x")
axes.set_ylabel("y")
# add grid lines
axes.grid(True)
plt.plot(all_x, all_y)
plt.show()
Output:
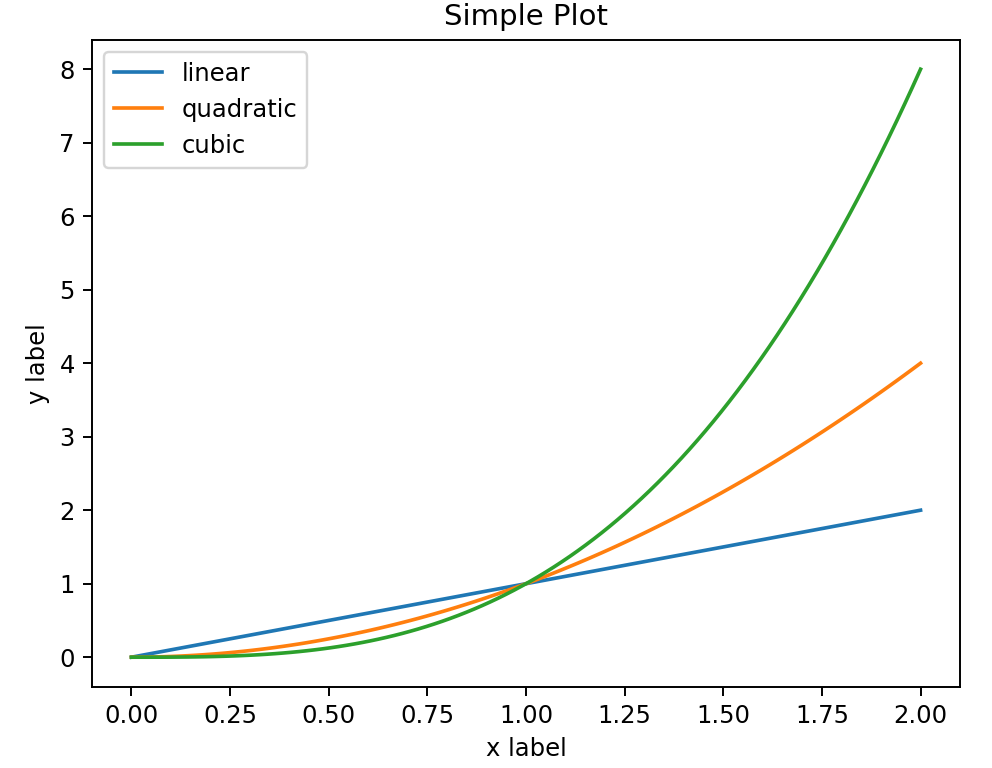
Line Plots with Equations
x = np.linspace(0, 2, 100) # Generate a numpy array of data to plot
fig, ax = plt.subplots() # Create a figure and an axes
ax.plot(x, x, label='linear') # Plot some data on the axes
ax.plot(x, x**2, label='quadratic') # Plot more data on the axes...
ax.plot(x, x**3, label='cubic') # ... and some more.
ax.set_xlabel('x label') # Add an x-label to the axes.
ax.set_ylabel('y label') # Add a y-label to the axes.
ax.set_title("Simple Plot") # Add a title to the axes.
ax.legend() # Add a legend.
plt.show()
Output:
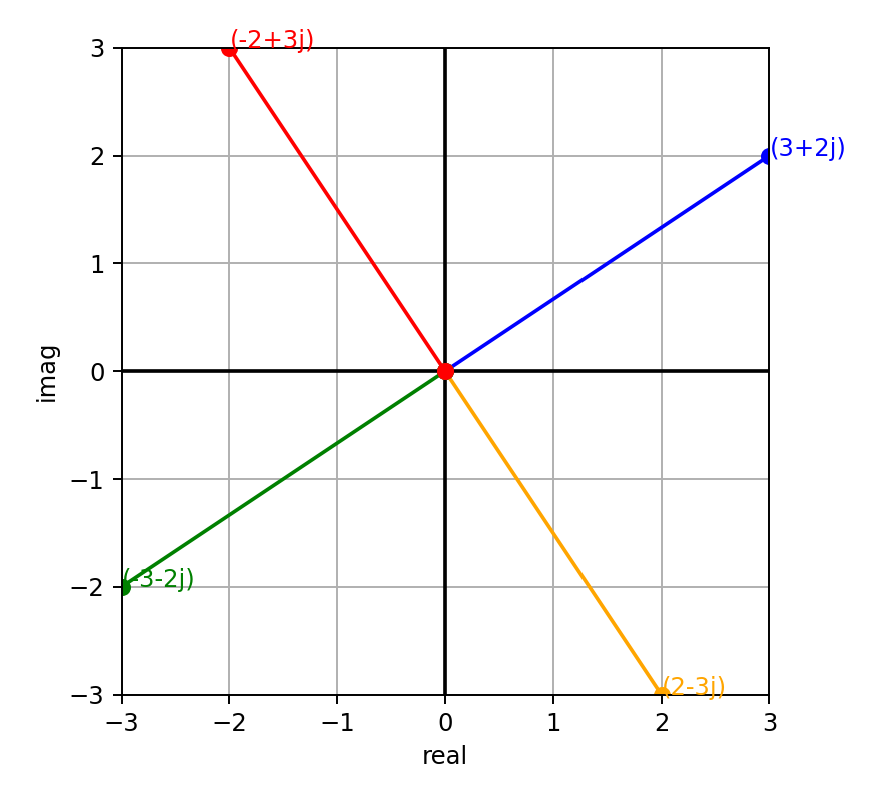
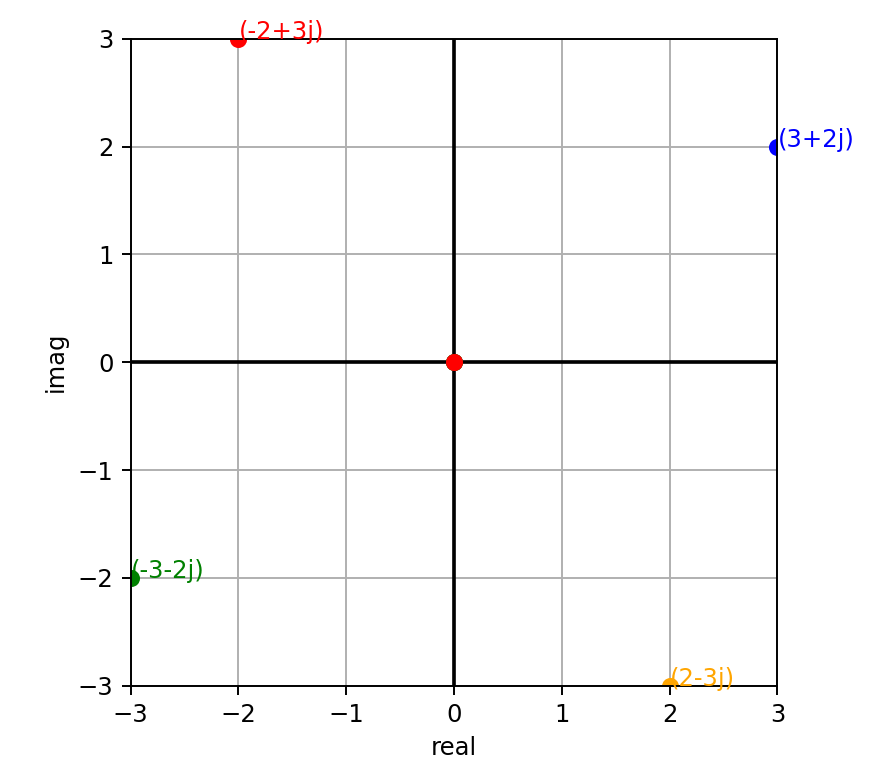
Argand Diagram
def cw_rotate(z: complex, degrees: float) -> complex:
""" Returns a new point, after rotating the supplied point about the origin, clockwise.
Args:
z (complex): Point to rotate
degrees (float): Degrees to rotate, CW
Returns:
complex: A new points
"""
# Note that complex number phase is expressed as a CCW angle to the real axis.
# Thus, to rotate CW, we have to always take the supplied angle from 360.
return z * 1j**((360-degrees)/90)
points: list[complex] = [] # store our points
POINT = 3+2j # starting point
print(POINT)
points.append(POINT)
for cw_angle in (90, 180, 270):
rotated_point = cw_rotate(POINT, cw_angle)
points.append(rotated_point)
fig, axes = plt.subplots() # Create out axes
axes.set_aspect('equal') # set x and y to equal aspect
axes.grid(True) # add grid lines
# add lines at x=0, y=0
plt.axhline(0, color='black')
plt.axvline(0, color='black')
# set the limits and labels for each axis
all_x = [num.real for num in points]
all_y = [num.imag for num in points]
axes.set_xlim(min(all_x), max(all_x))
axes.set_ylim(min(all_y), max(all_y))
axes.set_xlabel("real")
axes.set_ylabel("imag")
colours = ['blue', 'orange', 'green', 'red']
# Iterate over each point and plot
for i, point in enumerate(points):
# For this point, plot from origin to the point
plt.plot([0, point.real], [0, point.imag], '-', marker='o', color=colours[i])
# Add an annotation to the point. We can do this one of two ways...
# plt.text(point.real, point.imag, str(point))
plt.annotate(str(point), (point.real, point.imag), color=colours[i])
plt.show()
Output:
Scatter Plot: No Lines
We can amend one line above and use the format string parameter to remove the lines, as follows:
plt.plot([0, point.real], [0, point.imag], 'o', color=colours[i])
Inverted and With Hidden Axes: Rendering Characters!
Imagine we have a number of (x,y) coordinates defined in a set of point objects called dots. We can render them in a cool way, like this:
""" Render these coordinates as a scatter plot """
all_x = [point.x for point in dots]
all_y = [point.y for point in dots]
axes = plt.gca()
axes.set_aspect('equal')
plt.axis("off") # hide the border around the plot axes
axes.set_xlim(min(all_x)-1, max(all_x)+1)
axes.set_ylim(min(all_y)-1, max(all_y)+1)
axes.invert_yaxis()
axes.scatter(all_x, all_y, marker="o", s=50)
plt.show()
Output:

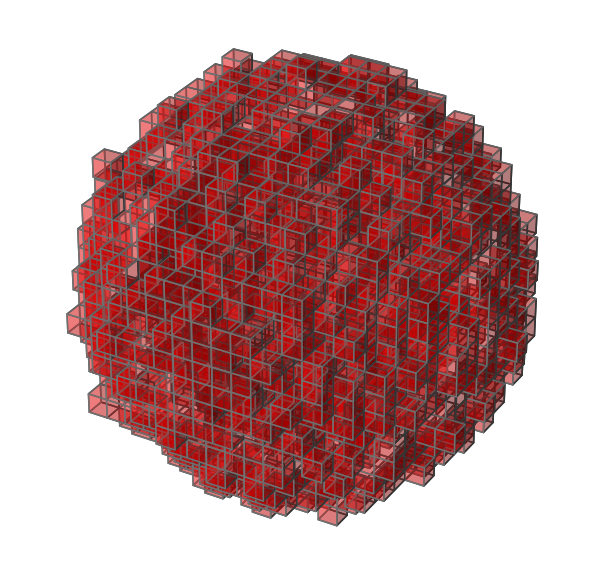
Rendering Cubes Using Matplotlib and NumPy
Here’s an example that renders 3D cubes based on a set of 3D coordinates:
def vis(self):
""" Render a visualisation of our droplet """
axes = [self._max_x+1, self._max_y+1, self._max_z+1] # set bounds
grid = np.zeros(axes, dtype=np.int8) # Initialise 3d grid to empty
for point in self.filled_cubes: # set our array to filled for all filled cubes
grid[point.x, point.y, point.z] = 1
facecolors = np.where(grid==1, 'red', 'black')
# Plot figure
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
ax.voxels(grid, facecolors=facecolors, edgecolors="grey", alpha=0.3)
ax.set_aspect('equal')
plt.axis("off")
plt.show()
The code above is taken from my 2022 Day 18 solution. The rendered image looks like this:
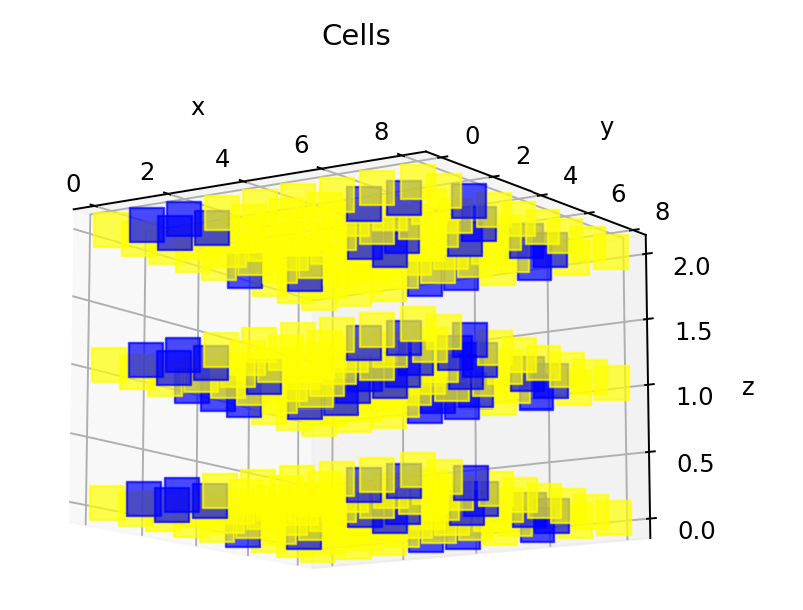
Rendering 3D Conway Cubes Animation, With NumPy and 3D Scatter
Taken from 2020 Day 17: Conway Cubes:
def show_grid(grid):
x_vals = [cell.get_x() for cell in grid]
y_vals = [cell.get_y() for cell in grid]
z_vals = [cell.get_z() for cell in grid]
min_x_add = 0
min_y_add = 0
min_z_add = 0
min_x = min(x_vals)
min_y = min(y_vals)
min_z = min(z_vals)
# we need to get rid of negative coords, since numpy doesn't support -ve values for indexes
if min_x < 0:
min_x_add = 0 - min_x
if min_y < 0:
min_y_add = 0 - min_y
if min_z < 0:
min_z_add = 0 - min_z
x_size = (max(x_vals) + 1) - min(x_vals)
y_size = (max(y_vals) + 1) - min(y_vals)
z_size = (max(z_vals) + 1) - min(z_vals)
xyz = np.zeros((x_size, y_size, z_size))
for cell in grid:
x = cell.get_x() + min_x_add
y = cell.get_y() + min_y_add
z = cell.get_z() + min_z_add
xyz[x, y, z] = 1
axes = plt.axes(projection='3d')
for index, active in np.ndenumerate(xyz):
if active == 1:
axes.scatter3D(*index, c='blue', marker='s', s=200, alpha=0.7)
else:
axes.scatter3D(*index, c='yellow', marker='s', s=200, alpha=0.7)
axes.set_xlabel('x')
axes.set_ylabel('y')
axes.set_zlabel('z')
axes.set_title('Cells')
plt.show()
2D Hexagons Animation
Taken from 2020 Day 24: Hexagons and Neighbours:
def vis_state(black_tiles, all_tiles, iteration):
white_tiles = all_tiles.difference(black_tiles)
all_x, all_y = zip(*all_tiles)
white_x, white_y = zip(*white_tiles)
black_x, black_y = zip(*black_tiles)
min_x, max_x = min(all_x), max(all_x)
min_y, max_y = min(all_y), max(all_y)
# hexagon!
shape = 'h'
fig, ax = plt.subplots(dpi=141)
ax.set_facecolor('xkcd:orange')
ax.set_xlim(min_x-1, max_x+1)
ax.set_ylim(min_y-1, max_y+1)
# we want x axis compressed, given our hex geometry.
# I.e. given that e or w = 2 units.
ax.set_aspect(1.75)
# dynamically compute the marker size
fig.canvas.draw()
mkr_size = ((ax.get_window_extent().width / (max_x-min_x) * (134/fig.dpi)) ** 2)
# make sure the ticks have integer values
ax.xaxis.set_major_locator(MaxNLocator(integer=True))
ax.scatter(black_x, black_y, marker=shape, s=mkr_size, color='black', edgecolors='black')
ax.scatter(white_x, white_y, marker=shape, s=mkr_size, color='white', edgecolors='black')
ax.set_title(f"Tile Floor, Iteration: {iteration-1}")
if not os.path.exists(OUTPUT_DIR):
os.makedirs(OUTPUT_DIR)
# save the plot as a frame
filename = OUTPUT_DIR + "tiles_anim_" + str(iteration) + ".png"
plt.savefig(filename)
# plt.show()
anim_frame_files.append(filename)
2D Migration Animation
Taken from 2021 Day 25: Migrating Sea Cucumbers:
def _render_frame(self):
""" Only renders an animation frame if we've attached an Animator """
if not self._animator:
return
east = set()
south = set()
for y in range(self._grid_len):
for x in range(self._row_len):
if self._grid[y][x] == ">":
east.add((x,y))
elif self._grid[y][x] == "v":
south.add((x,y))
east_x, east_y = zip(*east)
south_x, south_y = zip(*south)
axes, mkr_size = self._plot_info
axes.clear()
min_x, max_x = -0.5, self._row_len - 0.5
min_y, max_y = -0.5, self._grid_len - 0.5
axes.set_xlim(min_x, max_x)
axes.set_ylim(max_y, min_y)
axes.scatter(east_x, east_y, marker=">", s=mkr_size, color="black")
axes.scatter(south_x, south_y, marker="v", s=mkr_size, color="white")
# save the plot as a frame; store the frame in-memory, using a BytesIO buffer
frame = BytesIO()
plt.savefig(frame, format='png') # save to memory, rather than file
self._animator.add_frame(frame)
def setup_fig(self):
if not self._animator:
return
my_dpi = 120
fig, axes = plt.subplots(figsize=(1024/my_dpi, 768/my_dpi), dpi=my_dpi, facecolor="black") # set size in pixels
axes.get_xaxis().set_visible(False)
axes.get_yaxis().set_visible(False)
axes.set_aspect('equal') # set x and y to equal aspect
axes.set_facecolor('xkcd:orange')
min_x, max_x = -0.5, self._row_len - 0.5
min_y, max_y = -0.5, self._grid_len - 0.5
axes.set_xlim(min_x, max_x)
axes.set_ylim(max_y, min_y)
# dynamically compute the marker size
fig.canvas.draw()
mkr_size = ((axes.get_window_extent().width / (max_x-min_x) * (45/fig.dpi)) ** 2)
return axes, mkr_size
Rendering an Animated Snake with Scatter
Taken from 2022 Day 09 - Rope Bridge:
def _init_plt(self):
""" Generate a Figure and Axes objects which are reused. """
my_dpi = 120
figure, axes = plt.subplots(figsize=(1024/my_dpi, 768/my_dpi), dpi=my_dpi, facecolor="white") # set size in pixels
axes.set_aspect('equal') # set x and y to equal aspect
axes.set_facecolor('xkcd:black')
return figure, axes
def _render_frame(self, visited: set[Point], iteration: int=0):
""" Only renders an animation frame if we've attached an enabled Animator """
fig, axes = self._plt_info
axes.clear()
# The grid will grow as the rope heads moves around
max_x = max(self._all_head_locations, key=lambda point: point.x).x
min_x = min(self._all_head_locations, key=lambda point: point.x).x
max_y = max(self._all_head_locations, key=lambda point: point.y).y
min_y = min(self._all_head_locations, key=lambda point: point.y).y
axes.set_xlim(min_x - 2, max_x + 2)
axes.set_ylim(min_y - 2, max_y + 2)
# dynamically compute the marker size
fig.canvas.draw()
factor = 40 # Smaller factor means smaller markers
mkr_size = int((axes.get_window_extent().width / (max_x-min_x+1) * (factor/fig.dpi)) ** 2)
# make sure the ticks have integer values
axes.xaxis.set_major_locator(MaxNLocator(integer=True))
head = self._knots[0]
tail = self._knots[-1]
others_knots = self._knots[1:-1]
visited_x = [point.x for point in visited if point != tail]
visited_y = [point.y for point in visited if point != tail]
for knot in others_knots:
axes.scatter(knot.x, knot.y, marker=MarkerStyle("."), s=mkr_size/2, color="white")
axes.scatter(head.x, head.y, marker=MarkerStyle("."), s=mkr_size, color="red")
axes.scatter(visited_x, visited_y, marker=MarkerStyle("x"), s=mkr_size/3, color="grey")
axes.scatter(tail.x, tail.y, marker=MarkerStyle("*"), s=mkr_size/2, color="yellow")
axes.set_title(f"Iteration: {iteration}; tail has visited {len(visited)} locations")
# save the plot as a frame; store the frame in-memory, using a BytesIO buffer
frame = BytesIO()
plt.savefig(frame, format='png') # save to memory, rather than file
self._animator.add_frame(frame)
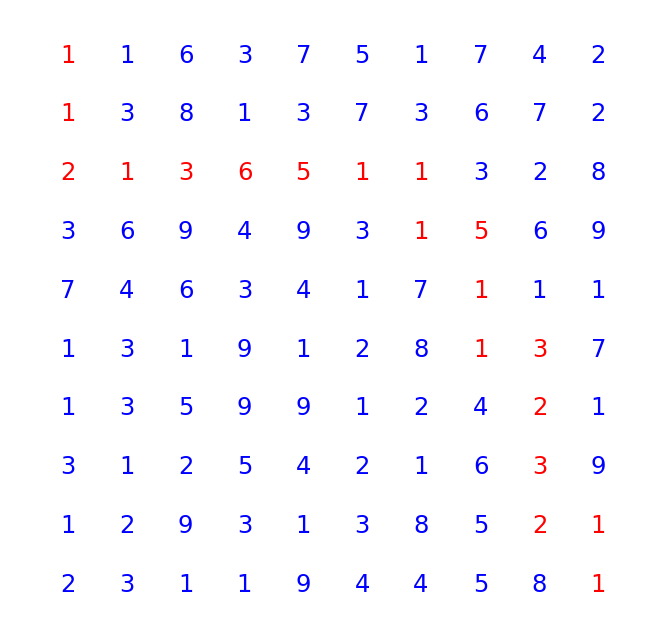
Visualising a Path Through a Maze
Taken from 2021 Day 15: Risk Maze:
def visualise_path(grid: Grid, path: list[tuple[Point, int]]):
""" Render this paper and its dots as a scatter plot """
all_x = [point.x for point in grid.all_points()]
all_y = [point.y for point in grid.all_points()]
labels = [grid.value_at_point(point) for point in grid.all_points()]
path_points = [Point(0,0)] + [path_item[0] for path_item in path]
axes = plt.gca()
axes.set_aspect('equal')
plt.axis("off") # hide the border around the plot axes
axes.set_xlim(min(all_x)-1, max(all_x)+1)
axes.set_ylim(min(all_y)-1, max(all_y)+1)
axes.invert_yaxis()
for point, label in zip(grid.all_points(), labels):
if point in path_points:
plt.text(point.x, point.y, s=str(label), color="r")
else:
plt.text(point.x, point.y, s=str(label), color="b")
plt.show()
Another Grid Visualisation
Taken from 2022 Day 12: Hill Climbing:
def render_as_plt(grid, path):
""" Render the display as a scatter plot """
x_vals = [point.x for point in grid.all_points()]
y_vals = [point.y for point in grid.all_points()]
path_x = [point.x for point in path]
path_y = [point.y for point in path]
axes = plt.gca()
axes.set_aspect('equal')
axes.set_xlim(min(x_vals)-1, max(x_vals)+1)
axes.set_ylim(min(y_vals)-1, max(y_vals)+1)
axes.invert_yaxis()
axes.scatter(x_vals, y_vals, marker="o", s=5, color="black")
axes.scatter(path_x, path_y, marker="o", s=5, color="red")
plt.show()
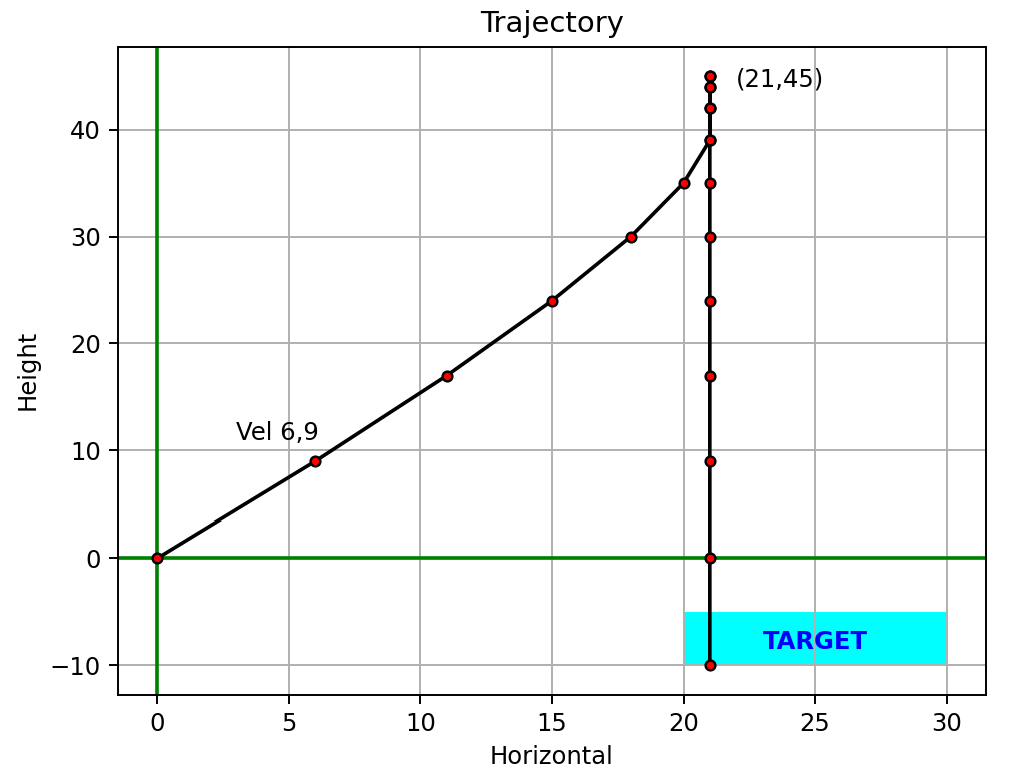
Plotting Trajectories
Taken from 2021 Day 17: Probe Trajectories:
def plot_trajectory(trajectory: list[Point], target: Rect, outputfile=None):
""" Render this trajectory as a plot, and optionally save it """
axes = plt.gca()
# Add axis lines at x=0 and y=0
plt.axhline(0, color='green')
plt.axvline(0, color='green')
axes.grid(True) # grid lines on
# Set up titles
axes.set_title("Trajectory")
axes.set_xlabel("Horizontal")
axes.set_ylabel("Height")
axes.fill(*target.as_polygon(), 'cyan') # add the target area
plt.annotate("TARGET", (target.left_x, target.top_y),
xytext=(target.left_x + ((target.right_x - target.left_x)/2)-2,
(target.top_y - (target.top_y-target.bottom_y)/2)-1),
color="blue", weight='bold')
# Plot the trajectory points
all_x = [point.x for point in trajectory]
all_y = [point.y for point in trajectory]
plt.plot(all_x, all_y, marker="o", markerfacecolor="red", markersize=4, color='black')
x, y = trajectory[1].x, trajectory[1].y
plt.annotate(f"Vel {x},{y}", (x,y), xytext=(x-3, y+2)) # label first point
x, y = [(point.x, point.y) for point in trajectory if point.y == max(point.y for point in trajectory)][0]
plt.annotate(f"({x},{y})", (x,y), xytext=(x+1, y-1)) # label highest point
if outputfile:
dir_path = Path(outputfile).parent
if not Path.exists(dir_path):
Path.mkdir(dir_path)
plt.savefig(outputfile)
logger.info("Plot saved to %s", outputfile)
else:
plt.show()
Plotting 3D Beacons
Taken from 2021 Day 19: Beacons and Scanners:
def plot(scanner_locations: dict[int, Vector], beacon_locations: set[Vector], outputfile=None):
_ = plt.figure(111)
axes = plt.axes(projection="3d")
axes.set_xlabel("x")
axes.set_ylabel("y")
axes.set_zlabel("z")
axes.grid(True) # grid lines on
x,y,z = zip(*scanner_locations.values()) # scanner locations
axes.scatter3D(x, y, z, marker="o", color='r', s=40, label="Sensor")
offset=50
for x, y, z, scanner in zip(x, y, z, scanner_locations.keys()): # add scanner numbers
axes.text3D(x+offset, y+offset, z+offset, s=scanner, color="red", fontweight="bold")
x,y,z = zip(*beacon_locations)
axes.scatter3D(x, y, z, marker=".", c='blue', label="Probe", s=10)
x_line = [min(x), max(x)]
y_line = [0, 0]
z_line = [0, 0]
plt.plot(x_line, y_line, z_line, color="black", linewidth=1)
x_line = [0, 0]
y_line = [min(y), max(y)]
z_line = [0, 0]
plt.plot(x_line, y_line, z_line, color="black", linewidth=1)
x_line = [0, 0]
y_line = [0, 0]
z_line = [min(z), max(z)]
plt.plot(x_line, y_line, z_line, color="black", linewidth=1)
axes.legend()
plt.title("Scanner and Beacon Locations", fontweight="bold")
if outputfile:
dir_path = Path(outputfile).parent
if not Path.exists(dir_path):
Path.mkdir(dir_path)
plt.savefig(outputfile)
logger.info("Plot saved to %s", outputfile)
else:
plt.show()
![]()
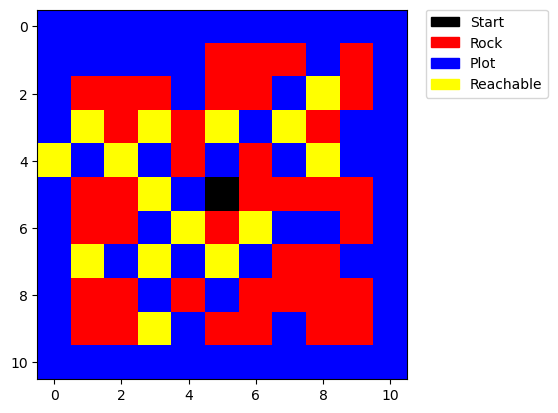
Plotting a 2D grid from NumPy, with Legend
Sometimes it can be more effective to convert a 2D array into NumPy format before plotting. E.g.
Taken from 2023 Day 21: Finding Paths:
def plot(grid, start, visited: set):
# Map the characters to numbers: S -> 0, # -> 1, . -> 2, O -> 3
char_to_num = {'S': 0, '#': 1, '.': 2, 'O': 3}
cmap = mcolors.ListedColormap(['black', 'red', 'blue', 'yellow'])
numeric_grid = [[char_to_num[char] for char in row] for row in grid]
# Convert to a NumPy array for better handling by Matplotlib
numeric_grid = np.array(numeric_grid)
for (ci,ri) in visited: # update visited
numeric_grid[ri][ci] = 3
numeric_grid[start[1],start[0]] = 0 # update start
# Create custom patches for the legend
labels = ['Start', 'Rock', 'Plot', 'Reachable']
colors = ['black', 'red', 'blue', 'yellow']
patches = [mpatches.Patch(color=colors[i], label=labels[i]) for i in range(len(colors))]
plt.imshow(numeric_grid, cmap=cmap)
plt.legend(handles=patches, bbox_to_anchor=(1.05, 1), loc=2, borderaxespad=0.)
plt.show()
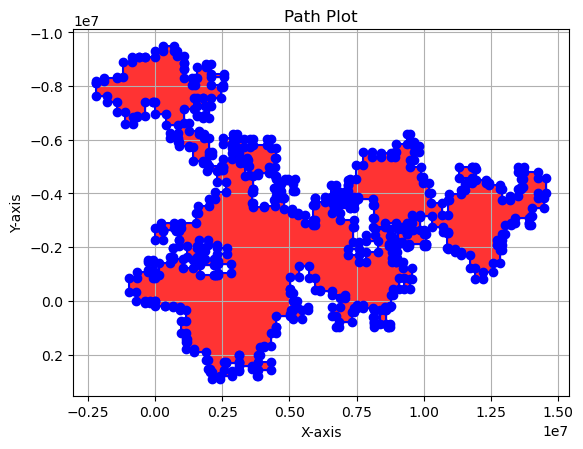
Plotting and Filling a Polygon
Taken from 2023 Day 18: Filling the Lava Lagoon:
def plot_path(perimeter: list[tuple]):
# Extract x and y values from the perimeter
perimeter_x_values = [point[0] for point in perimeter]
perimeter_y_values = [point[1] for point in perimeter]
# Plot the perimeter as a line
plt.plot(perimeter_x_values, perimeter_y_values,
marker=MarkerStyle('o'), linestyle='-', color="blue", label="Perimeter")
# Fill the inside of the perimeter
plt.fill(perimeter_x_values, perimeter_y_values, color="red", alpha=0.8) # Adjust alpha for transparency
plt.title('Path Plot')
plt.xlabel('X-axis')
plt.ylabel('Y-axis')
plt.gca().invert_yaxis() # Invert the y-axis
plt.gca().set_aspect('equal', adjustable='box') # Set equal scale
plt.grid(True)
plt.show()
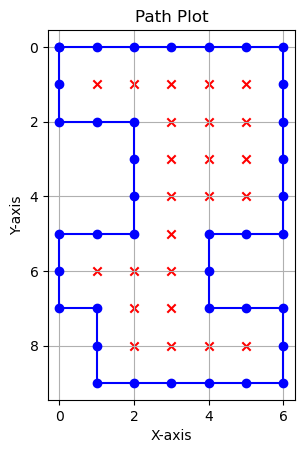
Plotting a Perimeter and Marking Contained Points
Taken from 2023 Day 18: Filling the Lava Lagoon:
def plot_path(path: list[tuple], inside: set[tuple]=set()):
# Extract x and y values from the path
loop_x_values = [point[0] for point in path]
loop_y_values = [point[1] for point in path]
# Extract x and y values from the inside set
inside_x_values = [point[0] for point in inside]
inside_y_values = [point[1] for point in inside]
# Plot the line and scatter graphs
plt.plot(loop_x_values, loop_y_values,
marker=MarkerStyle('o'), linestyle='-', color="blue", label="Loop")
plt.scatter(inside_x_values, inside_y_values,
marker=MarkerStyle('x'), color="red", label="Inside")
plt.title('Path Plot')
plt.xlabel('X-axis')
plt.ylabel('Y-axis')
plt.gca().invert_yaxis() # Invert the y-axis
plt.gca().set_aspect('equal', adjustable='box') # set equal scale
plt.grid(True)
plt.show()
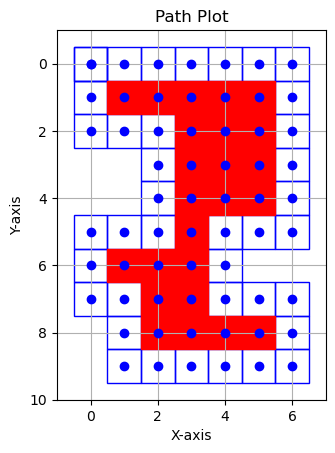
Creating Squares Around Points
Taken from 2023 Day 18: Filling the Lava Lagoon:
def plot_path(path: list[tuple], inside: set[tuple]=set()):
fig, ax = plt.subplots()
# Function to add a 1x1 square with the point at its center
def add_square(x, y, colour, fill=False):
square = Rectangle((x - 0.5, y - 0.5), 1, 1, fill=fill, edgecolor=colour, facecolor=colour)
ax.add_patch(square)
# Plot each point in the path as a square
for point in path:
add_square(point[0], point[1], 'blue')
# Plot each point in the inside set as a square
for point in inside:
add_square(point[0], point[1], 'red', fill=True)
# Extract x and y values for vertices
path_x_values = [point[0] for point in path]
path_y_values = [point[1] for point in path]
inside_x_values = [point[0] for point in inside]
inside_y_values = [point[1] for point in inside]
# Plot the actual vertex points
ax.scatter(path_x_values, path_y_values, color="blue", zorder=5)
ax.scatter(inside_x_values, inside_y_values, color="blue", zorder=5)
# Set limits for x and y axis
all_x_values = [point[0] for point in path] + [point[0] for point in inside]
all_y_values = [point[1] for point in path] + [point[1] for point in inside]
ax.set_xlim(min(all_x_values) - 1, max(all_x_values) + 1)
ax.set_ylim(min(all_y_values) - 1, max(all_y_values) + 1)
plt.title('Path Plot')
plt.xlabel('X-axis')
plt.ylabel('Y-axis')
plt.gca().invert_yaxis()
plt.gca().set_aspect('equal', adjustable='box')
plt.grid(True)
plt.show()
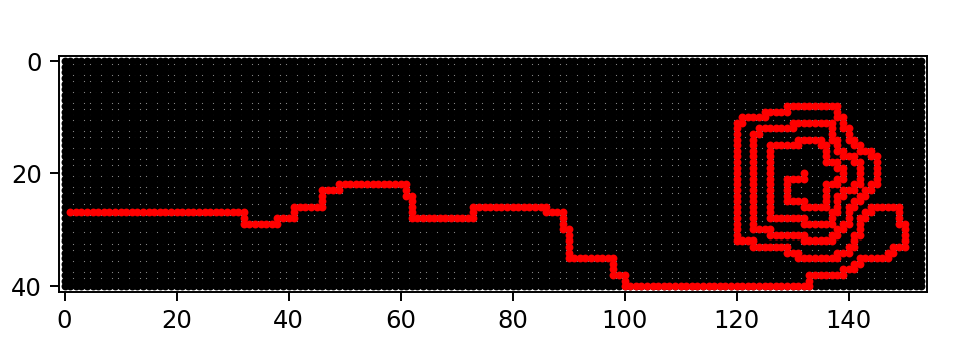
Animating with Matplotlib
E.g.
Taken from 2024 Day 6: Guard Gallivant:
My VisGuardMap extends GuardMap. It animates the path of a guard moving through a grid.
create_animation()sets up the animation using matplotlib’sFuncAnimation.- It initializes a plot showing obstacles and creates empty scatter plots for each movement direction.
- The key is
animate_step, called for each frame. It iterates through the_visitedlist, which stores visited grid points and their associated directions up to the current frame (n). - For each direction, it updates the corresponding scatter plot with the coordinates of newly visited points.
- FuncAnimation then compiles these frames into an animation, saved as a video file.
This approach is efficient since we don’t recreate the axes with each frame.
class VisGuardMap(GuardMap):
def __init__(self, grid_array: list, animating: bool = True, **kwargs) -> None:
super().__init__(grid_array=grid_array, **kwargs)
self.animating = animating
if self.animating:
self._plot_info = self._setup_fig()
self._frame_index = 0
def _setup_fig(self):
""" Initialise the plot """
my_dpi = 120
fig, axes = plt.subplots(figsize=(1024/my_dpi, 768/my_dpi), dpi=my_dpi, facecolor="white") # set size in pixels
axes.get_xaxis().set_visible(True)
axes.get_yaxis().set_visible(True)
axes.tick_params(axis='both', colors='black') # Change tick color
axes.xaxis.label.set_color('black') # Change x-axis label color
axes.yaxis.label.set_color('black') # Change y-axis label color
axes.invert_yaxis()
axes.set_aspect('equal') # set x and y to equal aspect
axes.set_facecolor('xkcd:black')
min_x, max_x = -0.5, self._width - 0.5
min_y, max_y = -0.5, self._height - 0.5
axes.set_xlim(min_x, max_x)
axes.set_ylim(max_y, min_y)
# dynamically compute the marker size
fig.canvas.draw()
mkr_size = ((axes.get_window_extent().width / (max_x-min_x) * (45/fig.dpi)) ** 2)
# Plot the obstacles
obst_x, obst_y = zip(*[(point.x, point.y) for point in self._all_obstacles])
axes.scatter(obst_x, obst_y, marker="*", s=mkr_size*0.5, color="xkcd:azure", label="Obstacle")
# Prepare empty scatter plots - one for each direction
visited_scatters = {dirn: axes.scatter([], [], marker=dirn, s=mkr_size * 0.5, color="white", label=f"Visited {dirn}")
for dirn in VisGuardMap.DIRECTIONS}
return fig, axes, mkr_size, visited_scatters
def create_animation(self, output_folder: Path, file_name: str, fps=10):
""" Create the animation, by calling the animate_step() method for each frame. """
self._plot_info = self._setup_fig() # Set up the figure for plotting
fig, axes, mkr_size, visited_scatter = self._plot_info
# Creating the animation
logger.debug(f"Creating the animation. We have {len(self._visited_map)} frames to render.")
anim = FuncAnimation(fig,
self.animate_step,
frames=len(self._visited),
interval=1000/fps, blit=True)
# Save the animation
output_folder.mkdir(exist_ok=True)
output_path = Path(locations.output_dir, file_name)
anim.save(output_path, writer='ffmpeg')
# Close the figure to prevent inline display in Jupyter Notebook
plt.close(fig)
def animate_step(self, n):
""" Add a frame for the nth step in the animation. """
if n > 0:
if n % 100 == 0:
logger.debug(f"Rendering frame {n}...")
# Update each scatter plot with points of the corresponding direction
for dirn in VisGuardMap.DIRECTIONS:
# Add the points to be shown in this frame, for this direction
new_points = [(point.x, point.y) for point, d in self._visited[:n+1] if d == dirn]
if new_points:
x, y = zip(*new_points)
# update the positions of the points in the scatter plot
self._plot_info[3][dirn].set_offsets(list(zip(x, y)))
return [scatter for scatter in self._plot_info[3].values()]
And we can use it like this:
# Implementing
guard_map = VisGuardMap(data)
while guard_map.move():
pass
guard_map.create_animation(output_folder=locations.output_dir,
file_name=name,
fps=fps)
Seaborn
// Coming Soon