Learning Python with Advent of Code Walkthroughs
Dazbo's Advent of Code solutions, written in Python
Advent of Code 2022 - Day 9
Useful Links
Concepts and Packages Demonstrated
dataclasslist comprehensionsetsassertionUnit TestingWorking with ImagesVisualisations with MatplotlibTiming with tqdm
Page Navigation
Problem Intro
This one was fun. Solving the problem took me an hour or so. But then I spent far too long creating a visualisation!
The goal is model the behaviour of a strange rope. The rope has a knot at each end: the head and the tail. At the beginning, both the head and tail occupy the same space.
The head of the rope is moved according to a set of instructions that look like this:
R 5
U 8
L 8
D 3
R 17
D 10
L 25
U 20
We’re told that whenever we move the head, the tail must move in order to remain adjacent to the head.
Part 1
How many positions does the tail of the rope visit at least once?
My strategy:
- Create a
Pointdataclass to store locations.- It should know how to add and subtract other Points, in order to get the vector between points.
- It should know how to generate a list of locations that are adjacent to it, and include it. We’ll use this to determine if the tail is adjacent to the head.
- Create points for the head and tail, and arbitrarily set them to
Point (0,0). - Store each tail position in a
set. This is how we record locations that have been visited at least once.- Then process each movement instruction:- For each step in the instruction (since an instruction has a direction and a magnitude):
- Add the movement vector to head, to create new head location.
- Get the vector between the new head and tail.
- If the tail needs to move to catch up, determine the movement required.
- Add the movement to the tail to create the new tail location, and store this in our visisted set.
- Return the size of the visisted set.
- For each step in the instruction (since an instruction has a direction and a magnitude):
First, the Point dataclass:
@dataclass(frozen=True)
class Point:
""" Class for storing a point x,y coordinate """
x: int
y: int
# create a list of (x,y) vectors that surround and include this point
WITHIN_ONE = [(dx,dy) for dx in range(-1, 2) for dy in range(-1, 2)]
def __add__(self, other):
return Point(self.x + other.x, self.y + other.y)
def __sub__(self, other):
return Point(self.x - other.x, self.y - other.y)
Notes on this class:
- We have overidden the
__add__()and__sub__()methods, thus allowing points to be added or subtracted using standard operators, i.e. using+and-, respectively. - We have used list comprehension to generate a list of all relative vectors that would be valid positions for the tail, compared to the head, i.e.
[(-1, -1), (-1, 0), (-1, 1), (0, -1), (0, 0), (0, 1), (1, -1), (1, 0), (1, 1)]
Then we’ve created VECTOR dict, to convert our input instructions to points/vectors:
VECTORS = {
'U': Point(0, 1),
'R': Point(1, 0),
'D': Point(0, -1),
'L': Point(-1, 0)
}
Finally, I create a RopeSim class:
class RopeSim():
""" Simulates a rope with a number of knots. We move the head according to a set of instructions.
Here we model the movement of the knots behind the head, according to the rules specified. """
def __init__(self, motions: list[tuple[str, int]], num_knots: int) -> None:
""" Expects a list of instructions in the format:
[['R', 5], ['U', 8], ...]
Models rope with num_knots. The first is the head, and the last is the tail. """
self._instructions = motions
self._num_knots = num_knots
self._knots = [Point(0,0) for _ in range(self._num_knots)]
@staticmethod
def _get_next_move(vector: Point) -> Point:
x_move = y_move = 0
move_x = move_y = False
if vector.y == 0: # we only need to move left or right
move_x = True
elif vector.x == 0: # we only need to move up or down
move_y = True
else: # we need to move diagonally
assert vector.x != 0 and vector.y != 0, "We must move diagonally"
move_x = move_y = True
if move_x:
x_move = 1 if vector.x > 0 else -1
if move_y:
y_move = 1 if vector.y > 0 else -1
return Point(x_move, y_move)
def pull_rope(self) -> set[Point]:
""" Simulate the rope knot movemens, according to the rules given. """
visited_locations: set[Point] = set()
visited_locations.add(self._knots[-1]) # track the tail
for direction, mag in self._instructions: # read char by char
for _ in range(mag): # move one step at a time
# print(f"Tail: {knots[-1]}; unique positions: {len(visited_locations)}")
self._knots[0] += VECTORS[direction] # move the head
for i in range(1, len(self._knots)): # move the tail
vector = self._knots[i-1] - self._knots[i]
if vector in [Point(x,y) for (x,y) in Point.WITHIN_ONE]:
continue # don't need to move
else:
self._knots[i] = self._knots[i] + RopeSim._get_next_move(vector)
visited_locations.add(self._knots[-1])
return visited_locations
I didn’t really need to use a class for this. But later, I wanted to add a visualisation, and doing this with a class just made life easier.
- Notes on the
__init__()method:- For Part 1, we instantiate our class with
2knots: the head and tail. - We then use list comprehension to set both knots to a
Pointof0,0.
- For Part 1, we instantiate our class with
- Notes on the
_get_next_move(vector: Point)method:- This method expects the vector between the head and the tail.
- If the tail is in the same row or column as the head, then we only need to move one unit towards the head in that axis.
- Otherwise, we know the tail needs to move diagonally towards the head.
- Note that the
xandycomponents of the vector will never exceed 1.
- Notes on the
pull_rope()method:- This is where we execute the movement instructions.
- Create a
visited setto store every location that tail has been. - Get the next movement instruction:
- For each step in the instruction:
- Move the head by adding the appropriate direction vector.
- For each successive remaining knot, of which there is only one:
- Determine the vector between this knot and the head.
- Check whether this vector is in our
WITHIN_ONElist. If it is, then the tail is already adjacent to (or in the same spot as) the head. - If it isn’t, call our
_get_next_move()method to determine the movement required for the tail. - Add this move, and store the new location of the tail.
- For each step in the instruction:
Now all we need to do is read our data, pass it to our RopeSim, and execute the pull_rope() method:
def main():
with open(INPUT_FILE, mode="rt") as f:
# convert to list of (direction, magnitude)
data = [(d, int(v)) for d, v in [instruction.split() for instruction in f.read().splitlines()]]
rope_sim = RopeSim(data, 2)
visited_locations = rope_sim.pull_rope()
print(len(visited_locations))
Part 2
Now we’re told the rope has mulitple knots. Each knot behaves like the tail to the knot in front of it.
Simulate your complete series of motions on a larger rope with ten knots. How many positions does the tail of the rope visit at least once?
Marvellous!! I don’t need to change anything! I just need to pass in 10 knots, instead of 2.
rope_sim = RopeSim(data, 10)
visited_locations = rope_sim.pull_rope()
print(len(visited_locations))
Results
The final code looks like this:
from dataclasses import dataclass
from pathlib import Path
import time
SCRIPT_DIR = Path(__file__).parent
# INPUT_FILE = Path(SCRIPT_DIR, "input/sample_input.txt")
INPUT_FILE = Path(SCRIPT_DIR, "input/input.txt")
@dataclass(frozen=True)
class Point:
""" Class for storing a point x,y coordinate """
x: int
y: int
# create a list of (x,y) vectors that sorround and include this point
WITHIN_ONE = [(dx,dy) for dx in range(-1, 2) for dy in range(-1, 2)]
def __add__(self, other):
return Point(self.x + other.x, self.y + other.y)
def __sub__(self, other):
return Point(self.x - other.x, self.y - other.y)
VECTORS = {
'U': Point(0, 1),
'R': Point(1, 0),
'D': Point(0, -1),
'L': Point(-1, 0)
}
def main():
with open(INPUT_FILE, mode="rt") as f:
# convert to list of (direction, magnitude)
data = [(d, int(v)) for d, v in [instruction.split() for instruction in f.read().splitlines()]]
answers = []
for num_knots in (2, 10)
rope_sim = RopeSim(data, num_knots)
visited_locations = rope_sim.pull_rope()
answers.append(len(visited_locations))
print(answers)
class RopeSim():
""" Simulates a rope with a number of knots. We move the head according to a set of instructions.
Here we model the movement of the knots behind the head, according to the rules specified. """
def __init__(self, motions: list[tuple[str, int]], num_knots: int) -> None:
""" Expects a list of instructions in the format:
[['R', 5], ['U', 8], ...]
Models rope with num_knots. The first is the head, and the last is the tail. """
self._instructions = motions
self._num_knots = num_knots
self._knots = [Point(0,0) for _ in range(self._num_knots)]
@staticmethod
def _get_next_move(vector: Point) -> Point:
x_move = y_move = 0
move_x = move_y = False
if vector.y == 0: # we only need to move left or right
move_x = True
elif vector.x == 0: # we only need to move up or down
move_y = True
else: # we need to move diagonally
assert vector.x != 0 and vector.y != 0, "We must move diagonally"
move_x = move_y = True
if move_x:
x_move = 1 if vector.x > 0 else -1
if move_y:
y_move = 1 if vector.y > 0 else -1
return Point(x_move, y_move)
def pull_rope(self) -> set[Point]:
""" Simulate the rope knot movemens, according to the rules given. """
visited_locations: set[Point] = set()
visited_locations.add(self._knots[-1]) # track the tail
for direction, mag in self._instructions: # read char by char
for _ in range(mag): # move one step at a time
# print(f"Tail: {knots[-1]}; unique positions: {len(visited_locations)}")
self._knots[0] += VECTORS[direction] # move the head
for i in range(1, len(self._knots)): # move the tail
vector = self._knots[i-1] - self._knots[i]
if vector in [Point(x,y) for (x,y) in Point.WITHIN_ONE]:
continue # don't need to move
else:
self._knots[i] = self._knots[i] + RopeSim._get_next_move(vector)
visited_locations.add(self._knots[-1])
return visited_locations
if __name__ == "__main__":
t1 = time.perf_counter()
main()
t2 = time.perf_counter()
print(f"Execution time: {t2 - t1:0.4f} seconds")
The output looks like this:
6376
2607
Execution time: 0.4464 seconds
Visualisation
This problem seems like a prime candidate for a cool visualisation. So I’ve had a go at creating an animation.
First, we need some extra imports:
from io import BytesIO
from pathlib import Path
import time
import imageio as iio
from tqdm import tqdm
from matplotlib import pyplot as plt
from matplotlib.markers import MarkerStyle
from matplotlib.ticker import MaxNLocator
Then I create an Animator class, which just happens to be Context Manager. I’ll talk about that another time!
class Animator():
""" Creates an animation file of specified target size.
Designed to be used as Context Manager. E.g.
with Animator(file=Path("path/to/file""), fps=num) as animator:
# code
"""
def __enter__(self):
""" Required for ContextManager implementation. """
if self._enabled:
self._create_path()
return self # so the as <name> returns an object
def __exit__(self, exc_type, exc_val, exc_tb):
""" Required for ContextManager implementation. """
if self._enabled:
self._save_anim()
def __init__(self, file: Path, fps: int, loop=1, enabled=True) -> None:
""" Create an Animator. Suggest the file should be a .gif.
Set frames per second (fps).
Set loop to 0, to loop indefinitely. Default is 1. """
self._enabled = enabled
self._outputfile = file
self._frames = [] # can be in-memory BytesIO objects, or files
self._fps = fps
self._loop = loop
@property
def enabled(self):
return self._enabled
@enabled.setter
def enabled(self, value: bool):
self._enabled = value
def _create_path(self):
if self._enabled:
dir_path = Path(self._outputfile).parent
if not Path.exists(dir_path):
Path.mkdir(dir_path)
def _save_anim(self):
""" Takes animation frames, and converts to a single animated file. """
with iio.get_writer(self._outputfile, mode='I', fps=self._fps, loop=self._loop) as writer:
for frame in tqdm(self._frames):
image = iio.imread(frame)
writer.append_data(image)
print(f"Animation saved to {self._outputfile}")
def add_frame(self, frame):
""" Add a frame to the animation.
The frame can be in the form of a BytesIO object, or a file Path
"""
self._frames.append(frame)
I won’t go into this class in detail. But a few notes…
- The
__enter__()and__exit__()methods allow me to use this class as a Context Manager, i.e. so that I can saywith Animator..., much like we do when we saywith open(...). - The
__init__()method accepts a parameter that can be used to DISABLE this animator. This is handy, since rendering animations is time consuming. - The
add_frame()method is intended to be called by our application code, whenever we have a frame - such as Maplotlib plot - that we’re ready to add to our animation. - The
_save_anim()writes our frames to a file on the disk. This method gets called automatically at the end of ourwithcontext block, assuming theAnimatorhas not been disabled. We also usetqdmto show a progress bar on the screen as we build the animation.
Now we need to actually generate our visual frames. To do that, we add the following two methods to our RopeSim class:
def _init_plt(self):
""" Generate a Figure and Axes objects which are reused. """
my_dpi = 120
figure, axes = plt.subplots(figsize=(1024/my_dpi, 768/my_dpi), dpi=my_dpi, facecolor="white") # set size in pixels
axes.set_aspect('equal') # set x and y to equal aspect
axes.set_facecolor('xkcd:black')
return figure, axes
def _render_frame(self, visited: set[Point], iteration: int=0):
""" Only renders an animation frame if we've attached an enabled Animator """
fig, axes = self._plt_info
axes.clear()
# The grid will grow as the rope heads moves around
max_x = max(self._all_head_locations, key=lambda point: point.x).x
min_x = min(self._all_head_locations, key=lambda point: point.x).x
max_y = max(self._all_head_locations, key=lambda point: point.y).y
min_y = min(self._all_head_locations, key=lambda point: point.y).y
axes.set_xlim(min_x - 2, max_x + 2)
axes.set_ylim(min_y - 2, max_y + 2)
# dynamically compute the marker size
fig.canvas.draw()
factor = 40 # Smaller factor means smaller markers
mkr_size = int((axes.get_window_extent().width / (max_x-min_x+1) * (factor/fig.dpi)) ** 2)
# make sure the ticks have integer values
axes.xaxis.set_major_locator(MaxNLocator(integer=True))
head = self._knots[0]
tail = self._knots[-1]
others_knots = self._knots[1:-1]
visited_x = [point.x for point in visited if point != tail]
visited_y = [point.y for point in visited if point != tail]
for knot in others_knots:
axes.scatter(knot.x, knot.y, marker=MarkerStyle("."), s=mkr_size/2, color="white")
axes.scatter(head.x, head.y, marker=MarkerStyle("."), s=mkr_size, color="red")
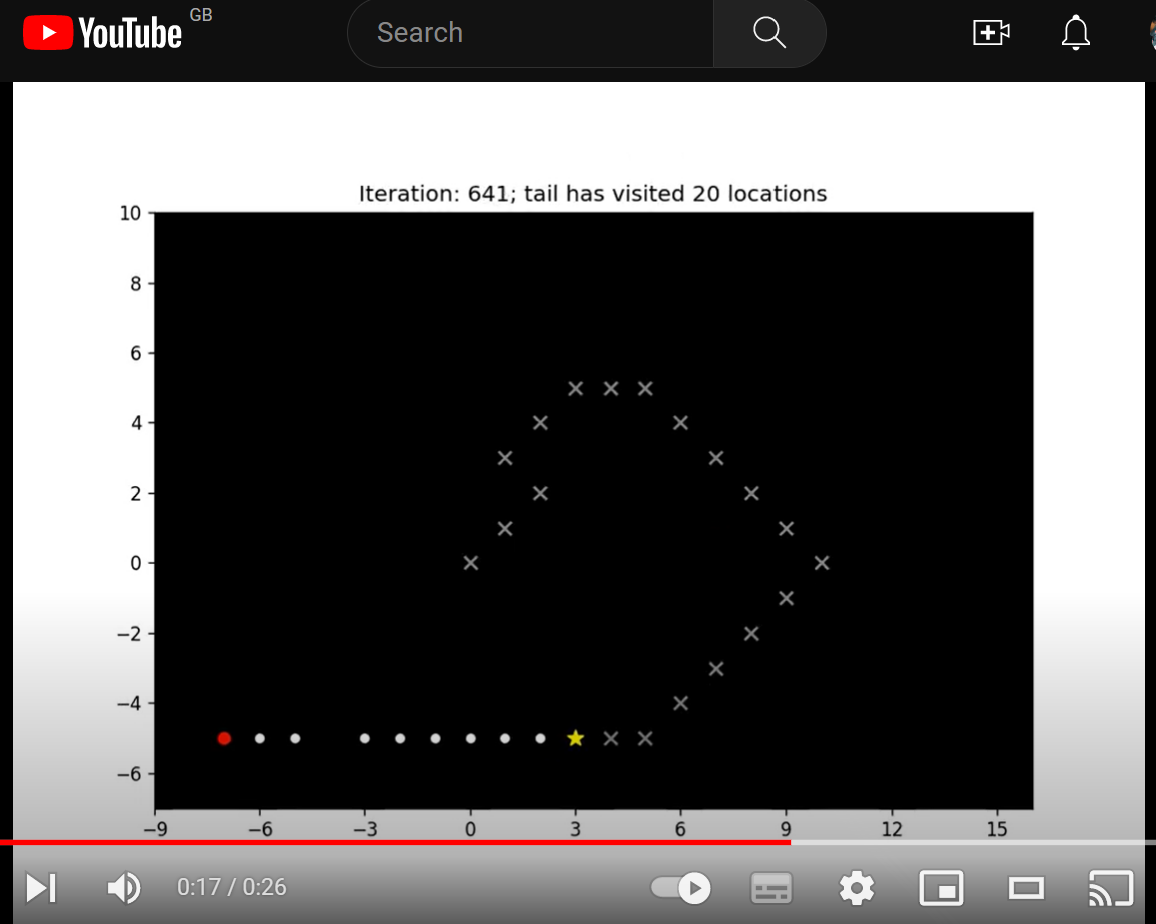
axes.scatter(visited_x, visited_y, marker=MarkerStyle("x"), s=mkr_size/3, color="grey")
axes.scatter(tail.x, tail.y, marker=MarkerStyle("*"), s=mkr_size/2, color="yellow")
axes.set_title(f"Iteration: {iteration}; tail has visited {len(visited)} locations")
# save the plot as a frame; store the frame in-memory, using a BytesIO buffer
frame = BytesIO()
plt.savefig(frame, format='png') # save to memory, rather than file
self._animator.add_frame(frame)
The _render_frame() method uses Matplotlib to render a scatter plot, using different colours for the head, the tail, the knots in between, and the visited set. At the end of the method, we save the current plot to a BytesIO object in memory, and then call our Animator add_frame() method to add it to the list of frames that will ultimately be converted to a file-based animation.
We also need to set the animator and initialise our Matplotlib plot, in our RopeSim __init__() method:
self._animator: Animator = animator
self._plt_info = self._init_plt() # contains (figure, axes)
Finally, we need to call _render_frame() whenever we move a knot. So our pull_rope() method now looks like this:
def pull_rope(self) -> set[Point]:
""" Simulate the rope knot movemens, according to the rules given. """
visited_locations: set[Point] = set()
visited_locations.add(self._knots[-1]) # track the tail
step = 0
for direction, mag in self._instructions: # read char by char
for _ in range(mag): # move one step at a time
# print(f"Tail: {knots[-1]}; unique positions: {len(visited_locations)}")
self._knots[0] += VECTORS[direction] # move the head
self._all_head_locations.add(self._knots[0])
for i in range(1, len(self._knots)): # move the tail
step += 1
vector = self._knots[i-1] - self._knots[i]
if vector in [Point(x,y) for (x,y) in Point.WITHIN_ONE]:
continue # don't need to move
else:
self._knots[i] = self._knots[i] + RopeSim._get_next_move(vector)
visited_locations.add(self._knots[-1])
if self._animator and self._animator.enabled:
self._render_frame(visited_locations, step)
return visited_locations
Here’s what it looks like:
So, my final code, including visualisation, looks like this:
from dataclasses import dataclass
from io import BytesIO
from pathlib import Path
import time
import imageio as iio
from tqdm import tqdm
from matplotlib import pyplot as plt
from matplotlib.markers import MarkerStyle
from matplotlib.ticker import MaxNLocator
SCRIPT_DIR = Path(__file__).parent
INPUT_FILE = Path(SCRIPT_DIR, "input/sample_input.txt")
# INPUT_FILE = Path(SCRIPT_DIR, "input/input.txt")
# MAKE SURE YOU DISABLE IF RUNNING WITH THE REAL DATA. IT TAKES TOO LONG!!!
ENABLE_ANIMATIONS = True
OUTPUT_FOLDER = Path(SCRIPT_DIR, "output/")
@dataclass(frozen=True)
class Point:
""" Class for storing a point x,y coordinate """
x: int
y: int
# create a list of (x,y) vectors that sorround and include this point
WITHIN_ONE = [(dx,dy) for dx in range(-1, 2) for dy in range(-1, 2)]
def __add__(self, other):
return Point(self.x + other.x, self.y + other.y)
def __sub__(self, other):
return Point(self.x - other.x, self.y - other.y)
class Animator():
""" Creates an animation file of specified target size.
Designed to be used as Context Manager. E.g.
with Animator(file=Path("path/to/file""), fps=num) as animator:
# code
"""
def __enter__(self):
""" Required for ContextManager implementation. """
if self._enabled:
self._create_path()
return self # so the as <name> returns an object
def __exit__(self, exc_type, exc_val, exc_tb):
""" Required for ContextManager implementation. """
if self._enabled:
self._save_anim()
def __init__(self, file: Path, fps: int, loop=1, enabled=True) -> None:
""" Create an Animator. Suggest the file should be a .gif.
Set frames per second (fps).
Set loop to 0, to loop indefinitely. Default is 1. """
self._enabled = enabled
self._outputfile = file
self._frames = [] # can be in-memory BytesIO objects, or files
self._fps = fps
self._loop = loop
@property
def enabled(self):
return self._enabled
@enabled.setter
def enabled(self, value: bool):
self._enabled = value
def _create_path(self):
if self._enabled:
dir_path = Path(self._outputfile).parent
if not Path.exists(dir_path):
Path.mkdir(dir_path)
def _save_anim(self):
""" Takes animation frames, and converts to a single animated file. """
with iio.get_writer(self._outputfile, mode='I', fps=self._fps, loop=self._loop) as writer:
for frame in tqdm(self._frames):
image = iio.imread(frame)
writer.append_data(image)
print(f"Animation saved to {self._outputfile}")
def add_frame(self, frame):
""" Add a frame to the animation.
The frame can be in the form of a BytesIO object, or a file Path
"""
self._frames.append(frame)
VECTORS = {
'U': Point(0, 1),
'R': Point(1, 0),
'D': Point(0, -1),
'L': Point(-1, 0)
}
def main():
with open(INPUT_FILE, mode="rt") as f:
# convert to list of (direction, magnitude)
data = [(d, int(v)) for d, v in [instruction.split() for instruction in f.read().splitlines()]]
answers = []
with Animator(file=Path(OUTPUT_FOLDER, "rope_bridge_pt1.gif"), fps=10, enabled=ENABLE_ANIMATIONS) as animator:
rope_sim = RopeSim(data, 2, animator=animator)
visited_locations = rope_sim.pull_rope()
answers.append(len(visited_locations))
with Animator(file=Path(OUTPUT_FOLDER, "rope_bridge_pt2.gif"), fps=20, enabled=ENABLE_ANIMATIONS) as animator:
rope_sim = RopeSim(data, 10, animator=animator)
visited_locations = rope_sim.pull_rope()
answers.append(len(visited_locations))
print(answers)
class RopeSim():
""" Simulates a rope with a number of knots. We move the head according to a set of instructions.
Here we model the movement of the knots behind the head, according to the rules specified. """
def __init__(self, motions: list[tuple[str, int]], num_knots: int, animator=None) -> None:
""" Expects a list of instructions in the format:
[['R', 5], ['U', 8], ...]
Models rope with num_knots. The first is the head, and the last is the tail. """
self._instructions = motions
self._num_knots = num_knots
self._knots = [Point(0,0) for _ in range(self._num_knots)]
self._all_head_locations: set[Point] = set() # for rendering the vis
self._animator: Animator = animator
self._plt_info = self._init_plt() # contains (figure, axes)
@staticmethod
def _get_next_move(vector: Point) -> Point:
x_move = y_move = 0
move_x = move_y = False
if vector.y == 0: # we only need to move left or right
move_x = True
elif vector.x == 0: # we only need to move up or down
move_y = True
else: # we need to move diagonally
assert vector.x != 0 and vector.y != 0, "We must move diagonally"
move_x = move_y = True
if move_x:
x_move = 1 if vector.x > 0 else -1
if move_y:
y_move = 1 if vector.y > 0 else -1
return Point(x_move, y_move)
def pull_rope(self) -> set[Point]:
""" Simulate the rope knot movemens, according to the rules given. """
visited_locations: set[Point] = set()
visited_locations.add(self._knots[-1]) # track the tail
step = 0
for direction, mag in self._instructions: # read char by char
for _ in range(mag): # move one step at a time
# print(f"Tail: {knots[-1]}; unique positions: {len(visited_locations)}")
self._knots[0] += VECTORS[direction] # move the head
self._all_head_locations.add(self._knots[0])
for i in range(1, len(self._knots)): # move the tail
step += 1
vector = self._knots[i-1] - self._knots[i]
if vector in [Point(x,y) for (x,y) in Point.WITHIN_ONE]:
continue # don't need to move
else:
self._knots[i] = self._knots[i] + RopeSim._get_next_move(vector)
visited_locations.add(self._knots[-1])
if self._animator and self._animator.enabled:
self._render_frame(visited_locations, step)
return visited_locations
def _init_plt(self):
""" Generate a Figure and Axes objects which are reused. """
my_dpi = 120
figure, axes = plt.subplots(figsize=(1024/my_dpi, 768/my_dpi), dpi=my_dpi, facecolor="white") # set size in pixels
axes.set_aspect('equal') # set x and y to equal aspect
axes.set_facecolor('xkcd:black')
return figure, axes
def _render_frame(self, visited: set[Point], iteration: int=0):
""" Only renders an animation frame if we've attached an enabled Animator """
fig, axes = self._plt_info
axes.clear()
# The grid will grow as the rope heads moves around
max_x = max(self._all_head_locations, key=lambda point: point.x).x
min_x = min(self._all_head_locations, key=lambda point: point.x).x
max_y = max(self._all_head_locations, key=lambda point: point.y).y
min_y = min(self._all_head_locations, key=lambda point: point.y).y
axes.set_xlim(min_x - 2, max_x + 2)
axes.set_ylim(min_y - 2, max_y + 2)
# dynamically compute the marker size
fig.canvas.draw()
factor = 40 # Smaller factor means smaller markers
mkr_size = int((axes.get_window_extent().width / (max_x-min_x+1) * (factor/fig.dpi)) ** 2)
# make sure the ticks have integer values
axes.xaxis.set_major_locator(MaxNLocator(integer=True))
head = self._knots[0]
tail = self._knots[-1]
others_knots = self._knots[1:-1]
visited_x = [point.x for point in visited if point != tail]
visited_y = [point.y for point in visited if point != tail]
for knot in others_knots:
axes.scatter(knot.x, knot.y, marker=MarkerStyle("."), s=mkr_size/2, color="white")
axes.scatter(head.x, head.y, marker=MarkerStyle("."), s=mkr_size, color="red")
axes.scatter(visited_x, visited_y, marker=MarkerStyle("x"), s=mkr_size/3, color="grey")
axes.scatter(tail.x, tail.y, marker=MarkerStyle("*"), s=mkr_size/2, color="yellow")
axes.set_title(f"Iteration: {iteration}; tail has visited {len(visited)} locations")
# save the plot as a frame; store the frame in-memory, using a BytesIO buffer
frame = BytesIO()
plt.savefig(frame, format='png') # save to memory, rather than file
self._animator.add_frame(frame)
if __name__ == "__main__":
t1 = time.perf_counter()
main()
t2 = time.perf_counter()
print(f"Execution time: {t2 - t1:0.4f} seconds")
Unit Testing
I’ve added a unit test to this application. I use this test to check that my application gives the right answers for the sample input.
Here, I’ve created a separate py script - called test_rope_bridge.py - in the same package folder:
from pathlib import Path
import unittest
import rope_bridge
SAMPLE_INPUT_FILE = Path(Path(__file__).parent, "input/sample_input.txt")
class TestRopeBridge(unittest.TestCase):
""" Set up data using the sample input.
Then run two tests, asserting the correct length of the returned lists. """
def setUp(self):
# load the data
with open(SAMPLE_INPUT_FILE, mode="rt") as f:
self.data = [(d, int(v)) for d, v in [instruction.split() for instruction in f.read().splitlines()]]
def test_part_1(self):
expected = 88
rope_sim = rope_bridge.RopeSim(self.data, 2)
self.assertEqual(len(rope_sim.pull_rope()), expected)
def test_part_2(self):
expected = 36
rope_sim = rope_bridge.RopeSim(self.data, 10)
self.assertEqual(len(rope_sim.pull_rope()), expected)
if __name__ == "__main__":
unittest.main()
This works as follows:
- I create
TestRopeBridgeclass, by extendingunittest.TestCase. - In the
setUp()method, I read in the sample input, and store it asself.data. - Then I create two tests, one for part 1 and another for part 2. For each, we:
- Create an instance of the
RopeSimclass. - Retrieve the result, and assert that the result matches the expected result.
- Create an instance of the